3D laser scanning allows surveyors to rapidly capture vast amounts of millimetre accurate measurements. These measurements are remotely captured from multiple setups throughout a site to afford comprehensive point cloud capture. Given the ability to remotely measure structures, features and environs, 3D laser scanning is a substantially beneficial technology to rapidly capture, dense and accurate surveying information in dangerous or complicated environments or detailed information of objects and items.
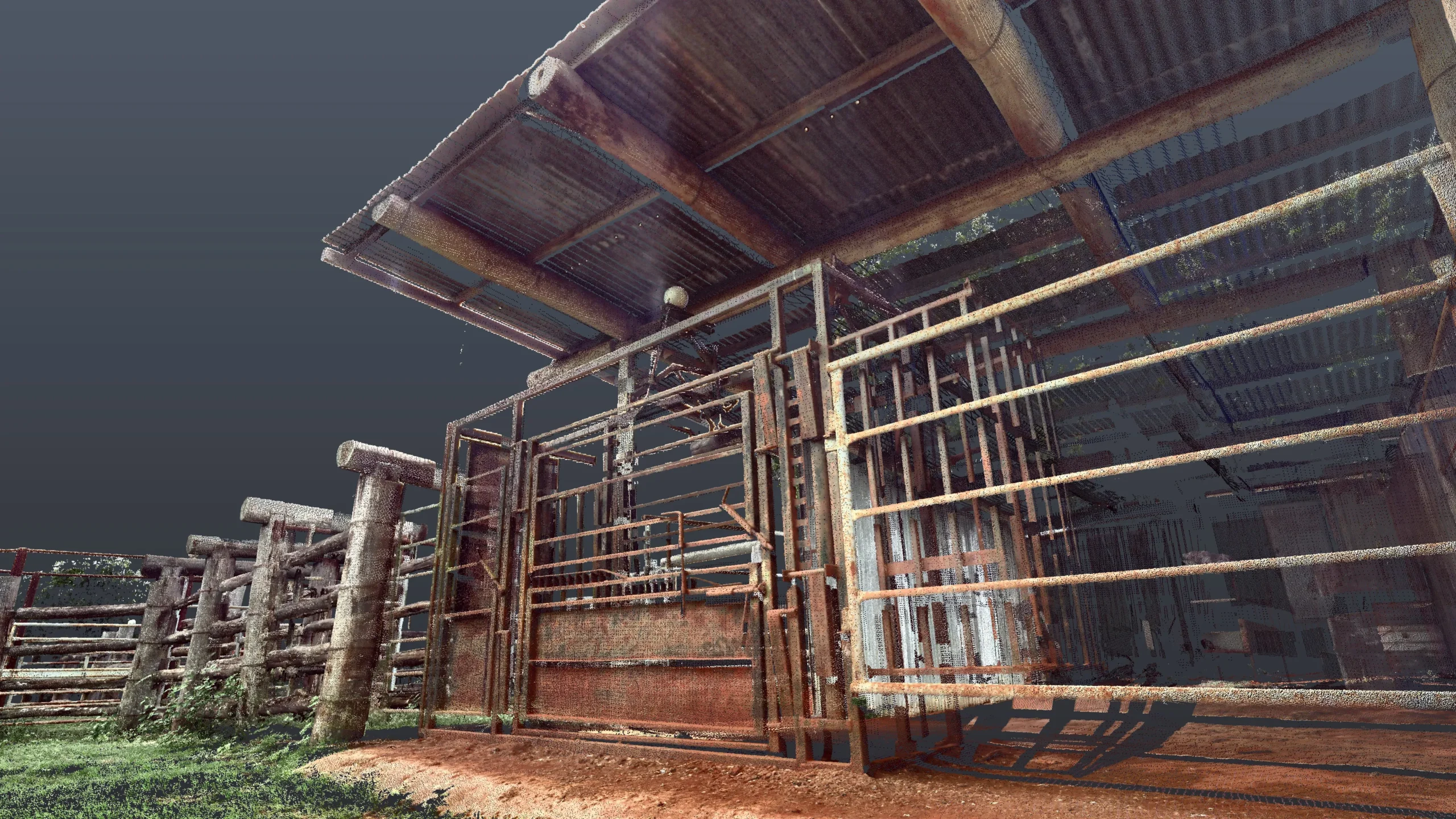
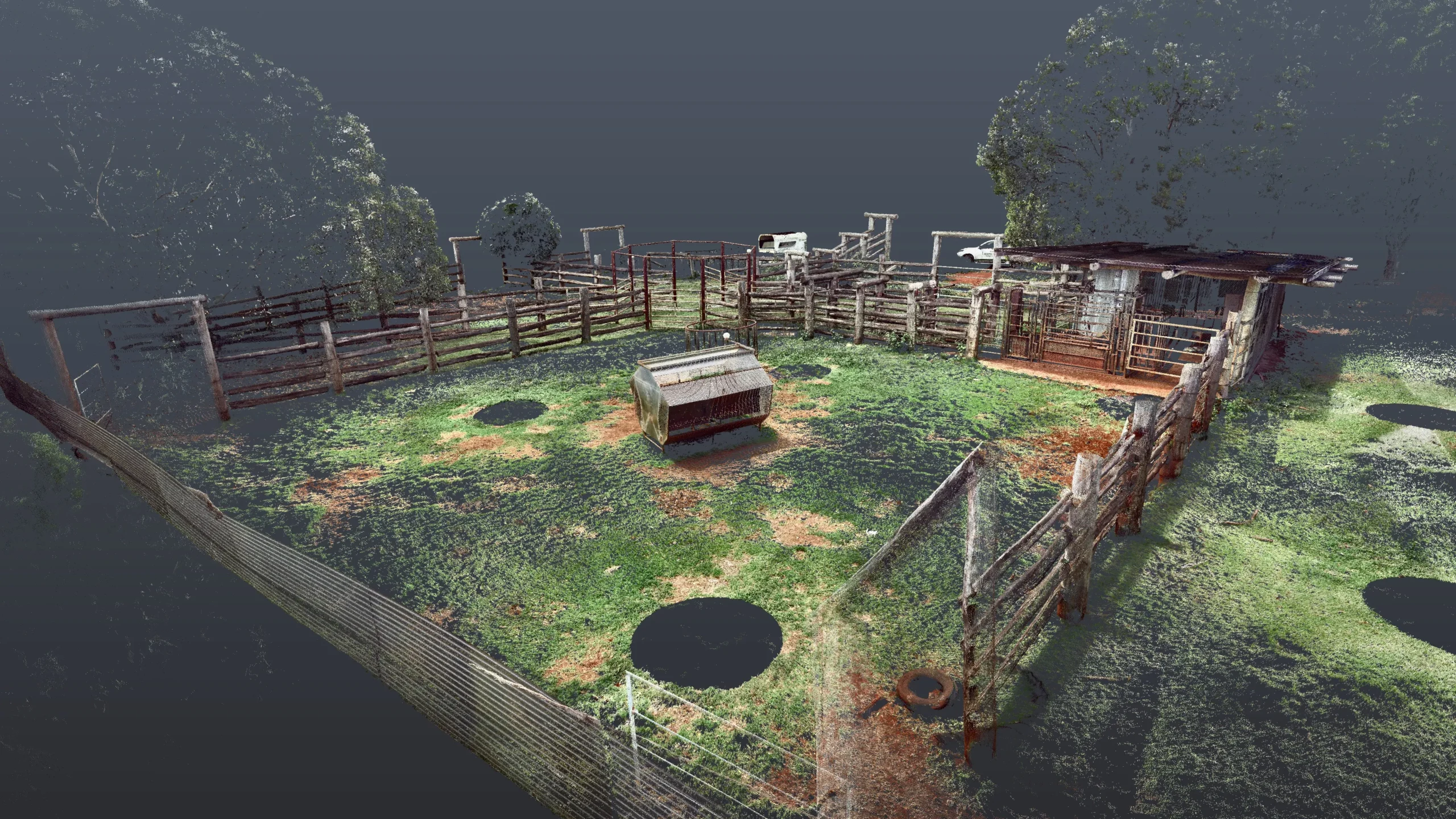
The density of the captured point clouds allows structures, features and environs to be interrogated in great detail; further informing design options, providing greater clarity of existing site conditions or additional detail for monitoring.
Data can be provided in point cloud format for point cloud savvy stakeholders or further enhanced and manipulated into 2D/3D points and strings or processed further still into 3D models and Building Information Models (BIMs).

Key Opportunities:
- Ability to capture sites, environs and objects in great detail in short periods of time.
- Remote measurement, meaning personnel and equipment can drastically limit exposure or negate the need to enter danger zones entirely, think confined spaces, railway corridors or tank strapping and volume mapping for vessels or when working with objects and environments that could be damaged by being handled or occupied.
- Can readily scale from measuring intricate bolt patterns for engineering purposes to broad-acre built environment allowing master planning and detailed design and redevelopment or movie sets for set documentation and visual effects (VFX).
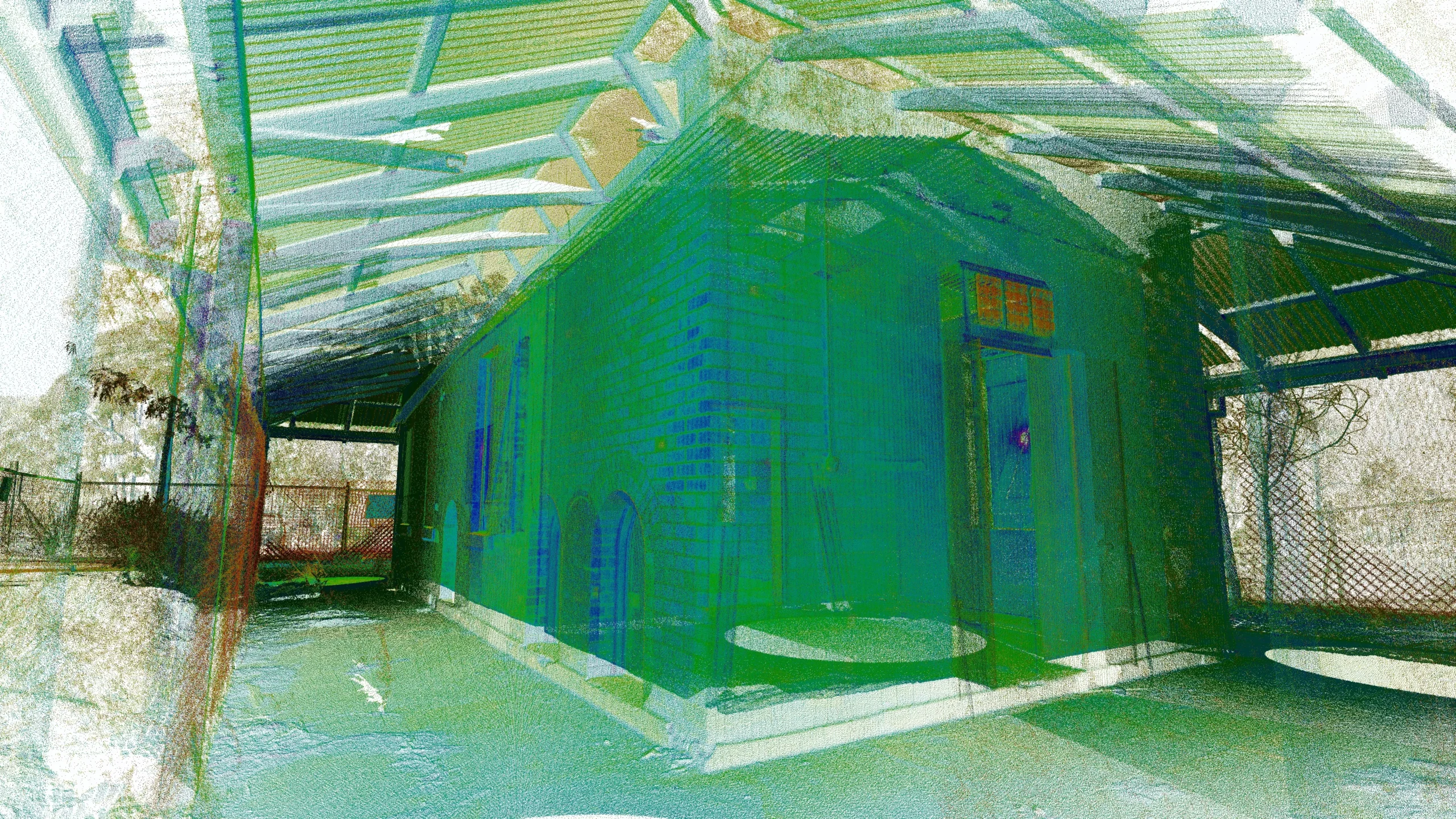
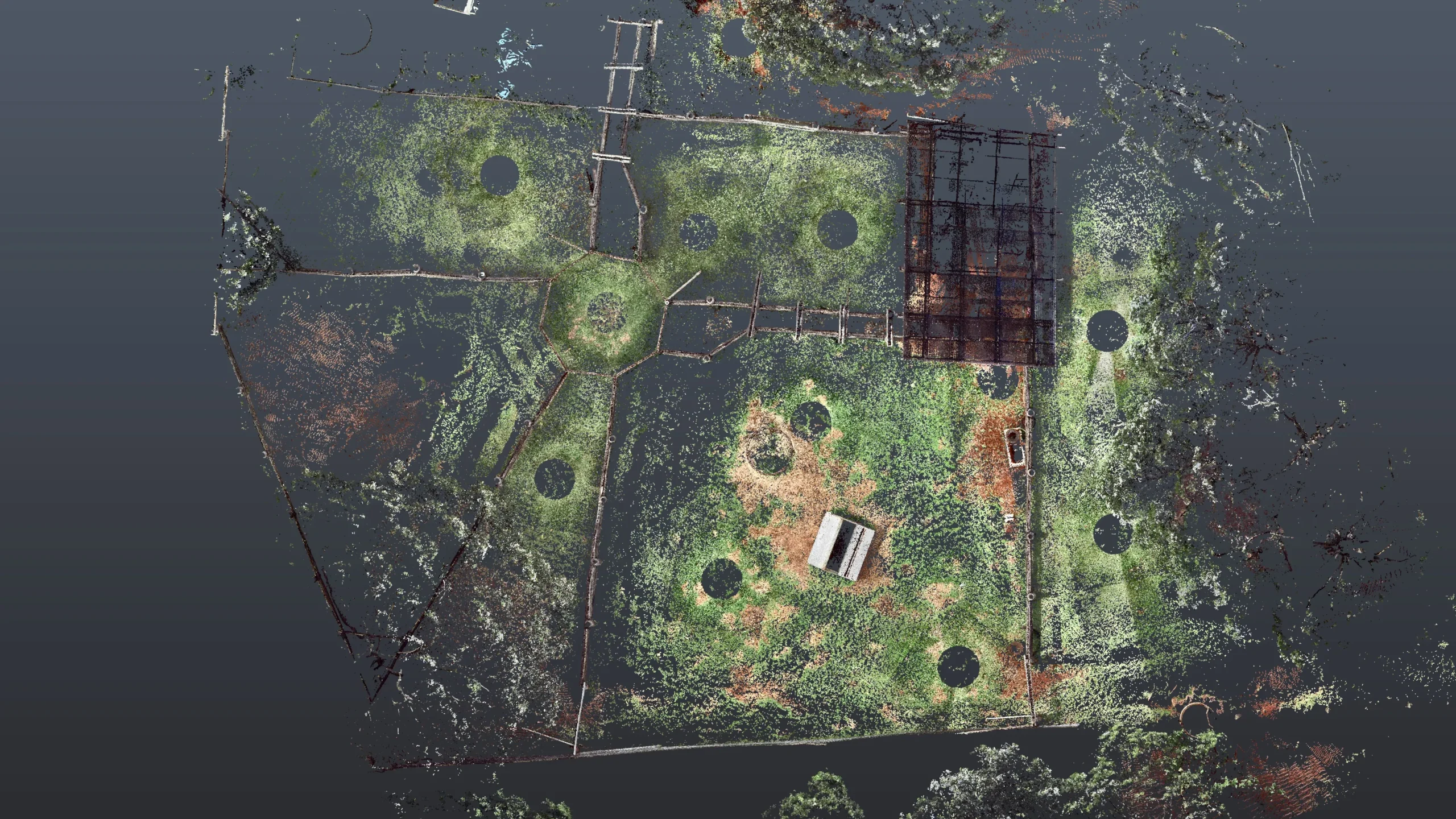
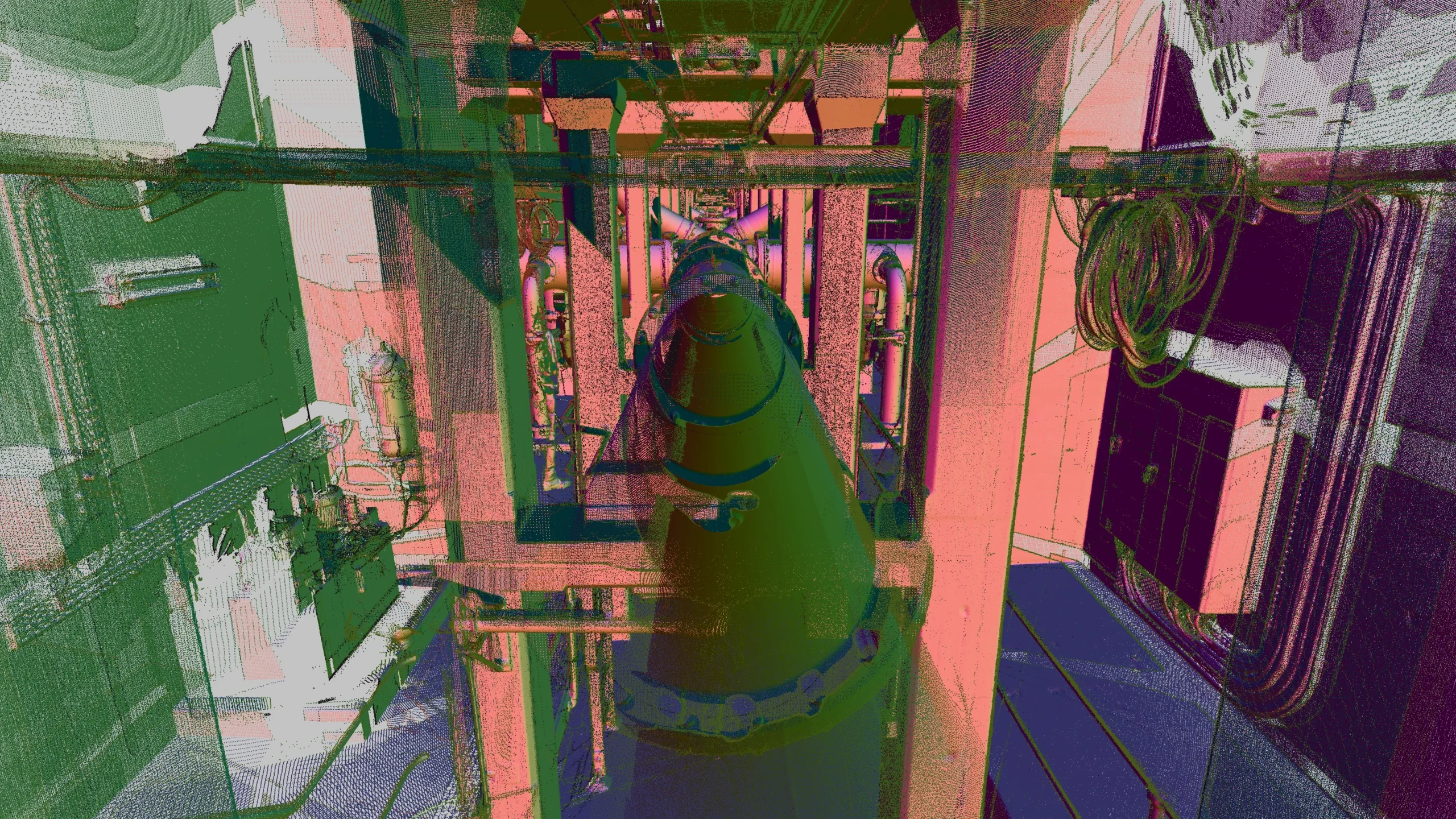
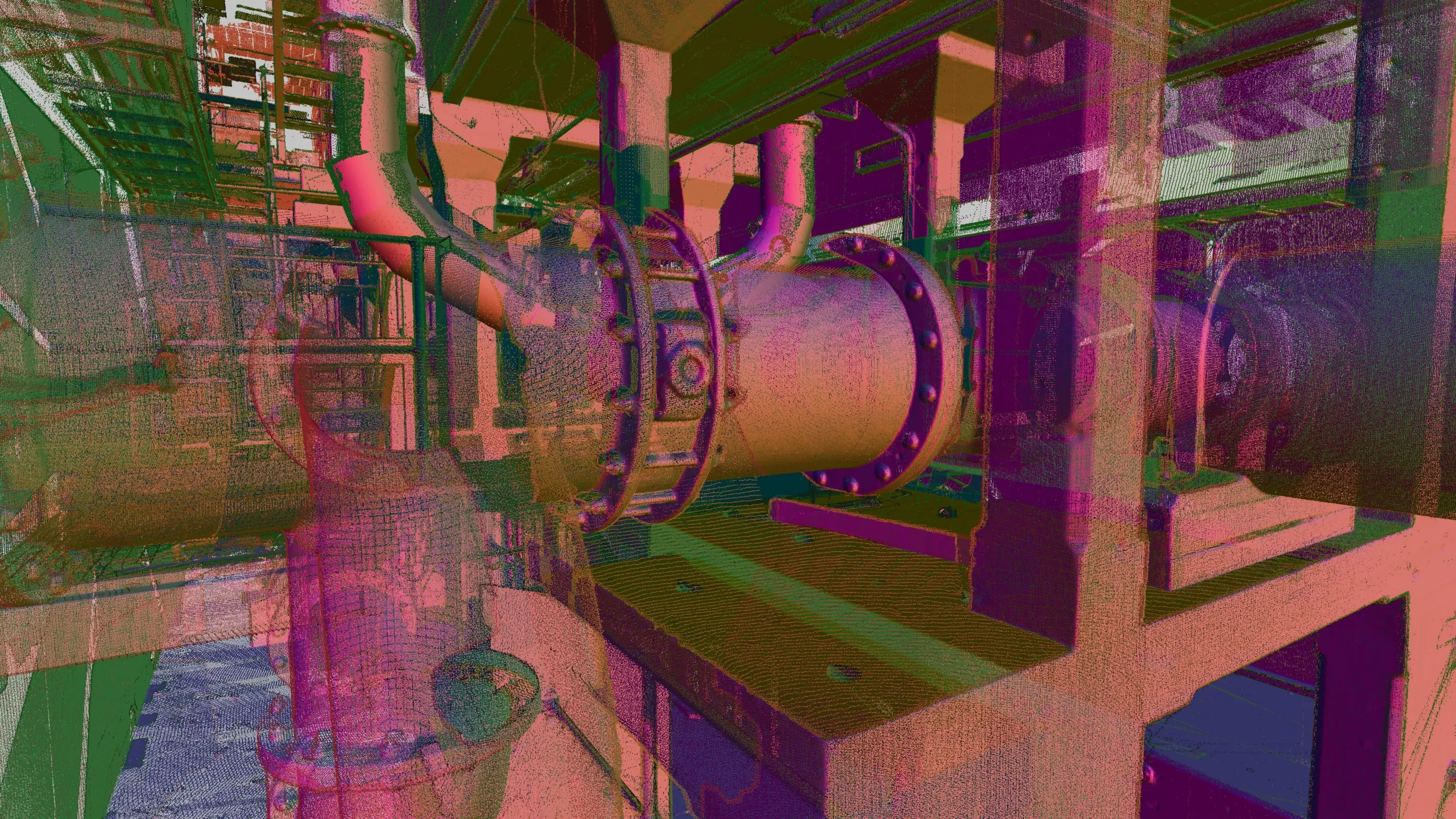
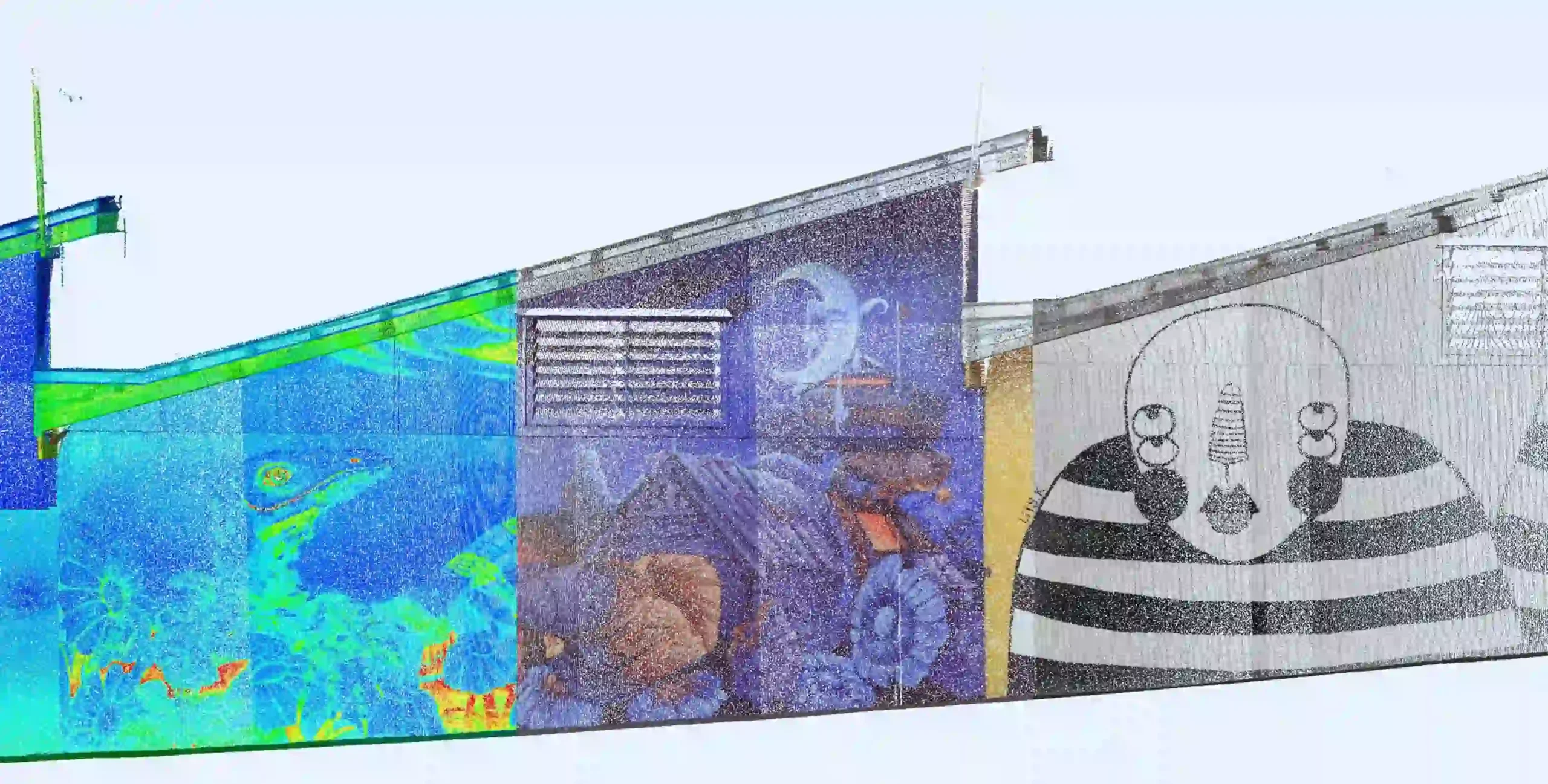
- Captures millions of laser measurements and photography to create colourised photo-realistic 3D point clouds representing an object, site or environ at a point in time giving a high level of detail; ideal for as-constructed, maintenance, asset management, dilapidation, monitoring and design.
- The ensuant point cloud, whilst being a versatile product can be further extracted from and processed to create points, strings, meshes and 3D models as needed for use by varying stakeholders.
Terrestrial Laser Scanning (aka. 3D Laser Scanning) works by sending a beam of light out which then in turn bounces off of objects and structures back to the laser scanner. This light is typically outside of the visible spectrum and can be pulses or a continuous stream, the distance is then measured by either the time-of-flight of the laser or the phase shift in the wavelength of the laser. The angular position, horizontal and vertical, of each measurement is related directly to the position of the scanning surfaces at the time of release and return, by combining this angular information with the distance a point in space can be created relative to the laser scanner, with millions of points captured from each setup, a point cloud can be created representing objects, structures and environs around each setup. The laser scanner can then be moved around and multiple setups conducted, the resulting point clouds from each setup can then be registered together utilising cloud to cloud fitting and survey control to ensure rigorous and accurate positioning of the point cloud relative to the rest of the world.
This point cloud information can be further processed into several different products, each taking varying amounts of time depending on the project needs or end user requirements:
- Points and strings which present as a product just like a traditional topographic survey;
- Basic 2D floor plans, reverse ceiling plans or site plans;
- 3D Models truly representing 3D objects and structures;
- Building Information Models (BIM) which combine the 3D Models with additional information to meet required Levels of Development (LoD), the highest of which sees realistic rendered 3D Models joined with an exhaustive database outlining intricate details and specifics of every element ranging from manufacturing dates and serial numbers to servicing schedules and replacement information;
- 3D Meshes can also be generated, which are incredibly useful for clash detection, visualisation and volume calculations.